Business challenges
The project presented technical complexities that directly impacted productivity:
- Extreme variability: the impossibility of creating clamping jigs for numerous small parts due to their variable positioning.
- Critical dimensions: managing workpieces up to 3.5 meters long, requiring extensive reach and operating ranges.
- High downtime: loading and clamping heavy, bulky structures occupied a disproportionate fraction of the total cycle time.
- Loading logistics: the need to use overhead cranes to move structural components within an area densely occupied by robots mounted on slides.

Strategic solution
The system architecture was engineered to maximize masked time and operational flexibility:
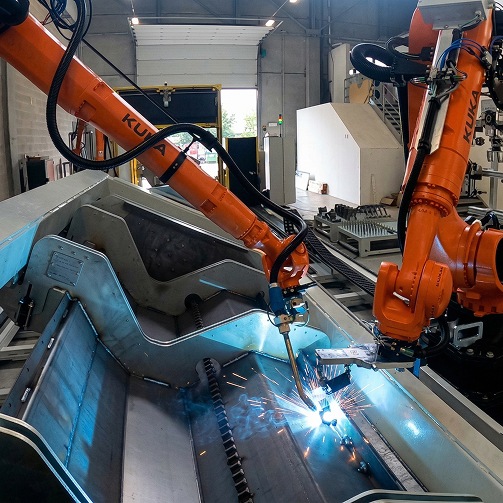
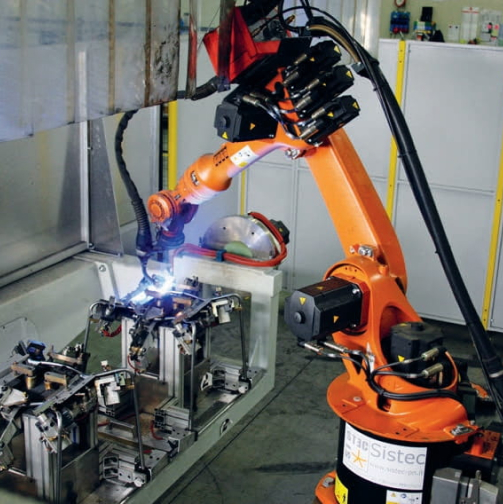
- Triple-robot configuration on slides: two KUKA IONTEC robots dedicated to welding and a third high-precision (HA) KUKA robot for real-time handling and positioning.
- “Robot-as-jig” technology: the handling robot positions small components with millimeter precision while the welding robot performs tack-welding, eliminating the cost and clutter of hundreds of fixed jigs.
- Dual mobile “lathe” stations: two welding fixtures mounted on separate sliding carriages. This system brings the loading zone outside the robots’ footprint, allowing for easy and safe use of overhead cranes.
- Self-adaptive welding fixtures: the handling robot automatically adjusts the fixture length by moving mobile sections along ball-recirculation guides, adapting instantaneously to the specific model being welded.
- Automatic tool changer: management of various gripping systems via a dedicated magazine and electro-pneumatic automatic changers mounted on the robot’s wrist.

Results and generated value
The integration of these technologies enabled the achievement of superior business objectives:
- Cycle time reduction: achieved through simultaneous welding by two robots on the same workpiece (made possible by the length of the structure).
- “Masked time” efficiency: while one side of the system is welding, the operator loads structural parts onto the second external carriage, eliminating machine downtime.
- Total model flexibility: the system automatically reconfigures for variable lengths ranging from 2,000 to 3,500 mm without any manual intervention on the equipment.
- Space optimization: the use of sliding carriages for the fixtures resolved the conflict between the robots’ footprint and the maneuvering space required for heavy loads.
Technical specifications and equipment
- Welding systems: 2x KUKA KR20 R3100 IONTEC mounted on linear slides to ensure maximum operational coverage.
- Handling unit: 1x KUKA KR120 R3100-2 HA (High Accuracy) on a slide, optimized for millimeter-precise component positioning.
- Dimensional capacity: designed to handle structures with cross-sections up to 1000×600 mm and extended lengths up to 3500 mm.
- Process Integration: welding power sources and peripherals integrated directly onto the slide—a strategic design choice that guarantees maximum freedom of movement and eliminates interference during complex machining tasks.










{kind=link}
{kind=link}
{kind=link}