













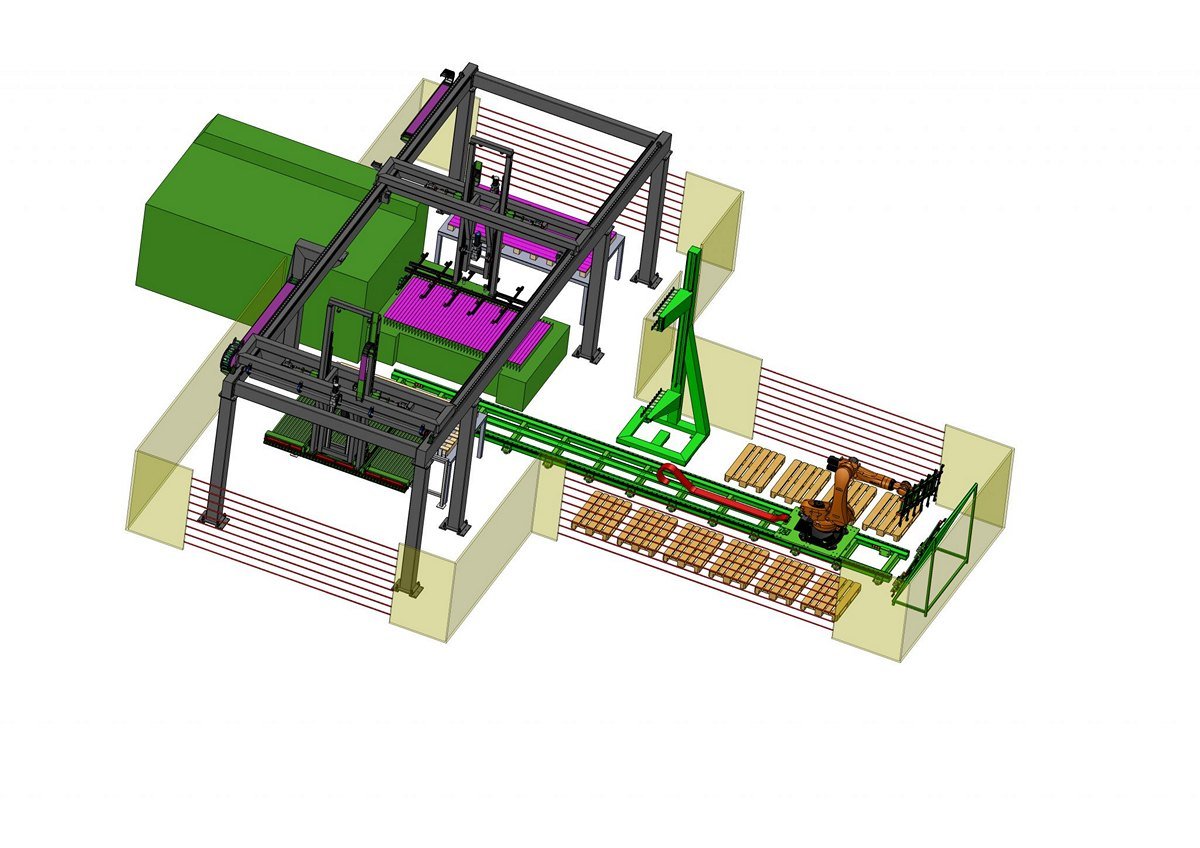
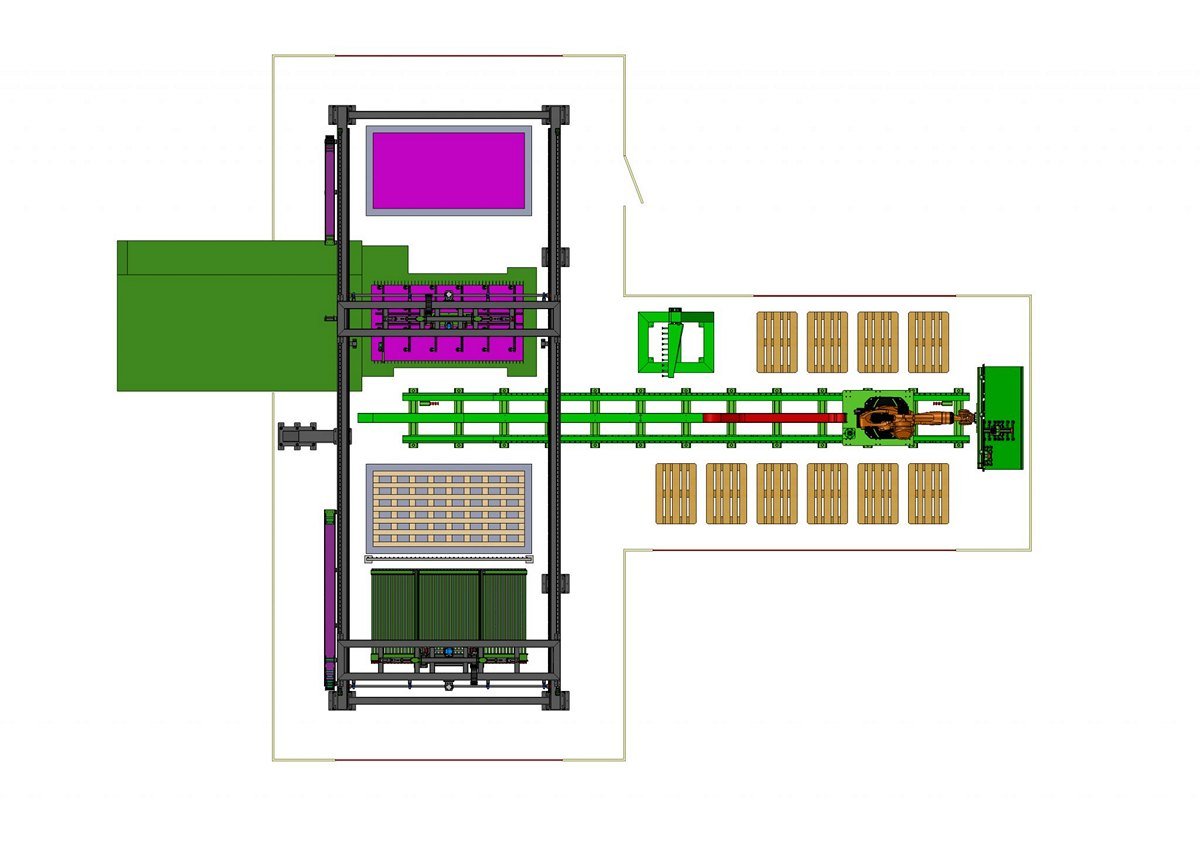
CELLA DI CARICO E SCARICO LASER CON SORTING
| STAZIONE | DESCRIZIONE STAZIONE | Q.TÀ |
|---|---|---|
| 00 | Sviluppo layout, progettazione sistema | 1 |
| 10 | Portale cartesiano | 1 |
| 20 | Carri verticali | 2 |
| 30 | Forca senza cinghia | 1 |
| 40 | Sistema di presa lamiera vergine | 1 |
| 50 | Banchi fissi di carico e scarico | 2 |
| 100 | Impianto elettrico e pneumatico | 1 |
| 110 | Protezioni | 1 |
| 120 | Montaggio sottogruppi | 1 |
| 130 | Prove e Collaudo in Sistec | 1 |
| SEZIONE ROBOT | ||
| 60 | Robot 90 Kg, R=3100 mm, con 7° asse (L = 10 m) | 1 |
| 70 | Sistema di presa | 3 |
| 80 | Magazzino sistemi di presa (5 posti) | 1 |
| 90 | Ribaltatore | 1 |
| 00 | Software per sorting | 1 |
| SUB-TOTALE, EX-WORKS | ||
| *OPTIONAL | ||
| 50 | Carri motorizzati carico/scarico | 2 |
| 30 | Differenza per forca con cinghia | 1 |